Step1.下載Dlib 的套件,可以從Google搜尋到,並下載19.22版本

Step2.解壓縮完之後,新增一個Install資料夾,等等用Cmake編譯好的東西會出現在這裡

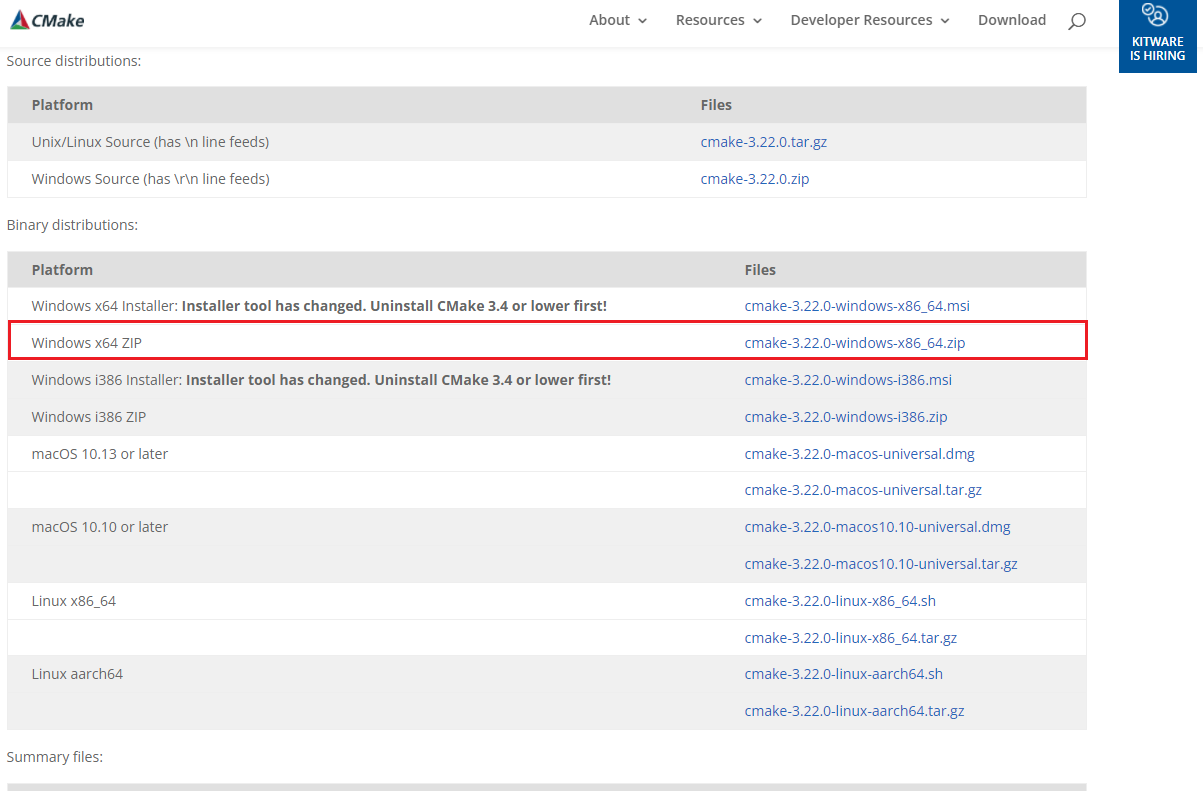
Step3.事前先安裝好Cmake,連結在這,不過版本可能會有些許的差異,因為我很早就下載使用了
Step4.開啟Cmake-gui

Step5.選擇適合自己的版本,並進行Configure


Step7.開啟專案後,針對ALL_BUILD建置

Step8.再針對INSTALL建置

Step9.最後放入程式碼,這邊參考Dlib官網的範例,如果可順利跑出結果就代表環境建置好啦
#include <dlib/gui_widgets.h>
#include <dlib/image_io.h>
#include <dlib/image_transforms.h>
#include <fstream>
using namespace std;
using namespace dlib;
// ----------------------------------------------------------------------------
int main(int argc, char** argv)
{
try
{
// make sure the user entered an argument to this program
if (argc != 2)
{
cout << "error, you have to enter a BMP file as an argument to this program" << endl;
return 1;
}
// Here we declare an image object that can store rgb_pixels. Note that in
// dlib there is no explicit image object, just a 2D array and
// various pixel types.
array2d img;
// Now load the image file into our image. If something is wrong then
// load_image() will throw an exception. Also, if you linked with libpng
// and libjpeg then load_image() can load PNG and JPEG files in addition
// to BMP files.
load_image(img, argv[1]);
// Now let's use some image functions. First let's blur the image a little.
array2d blurred_img;
gaussian_blur(img, blurred_img);
// Now find the horizontal and vertical gradient images.
array2d horz_gradient, vert_gradient;
array2d edge_image;
sobel_edge_detector(blurred_img, horz_gradient, vert_gradient);
// now we do the non-maximum edge suppression step so that our edges are nice and thin
suppress_non_maximum_edges(horz_gradient, vert_gradient, edge_image);
// Now we would like to see what our images look like. So let's use a
// window to display them on the screen. (Note that you can zoom into
// the window by holding CTRL and scrolling the mouse wheel)
image_window my_window(edge_image, "Normal Edge Image");
// We can also easily display the edge_image as a heatmap or using the jet color
// scheme like so.
image_window win_hot(heatmap(edge_image));
image_window win_jet(jet(edge_image));
// also make a window to display the original image
image_window my_window2(img, "Original Image");
// Sometimes you want to get input from the user about which pixels are important
// for some task. You can do this easily by trapping user clicks as shown below.
// This loop executes every time the user double clicks on some image pixel and it
// will terminate once the user closes the window.
point p;
while (my_window.get_next_double_click(p))
{
cout << "User double clicked on pixel: " << p << endl;
cout << "edge pixel value at this location is: " << (int)edge_image[p.y()][p.x()] << endl;
}
// wait until the user closes the windows before we let the program
// terminate.
win_hot.wait_until_closed();
my_window2.wait_until_closed();
// Finally, note that you can access the elements of an image using the normal [row][column]
// operator like so:
cout << horz_gradient[0][3] << endl;
cout << "number of rows in image: " << horz_gradient.nr() << endl;
cout << "number of columns in image: " << horz_gradient.nc() << endl;
}
catch (exception& e)
{
cout << "exception thrown: " << e.what() << endl;
}
}

結果圖
參考:
1.http://dlib.net/